Welcome to the documentation of last_letter¶
last_letter is a collection of ROS packages suitable for Unmanned Aerial Vehicle research, control algorithm development, non-linear physics simulation, Software-in-the-Loop (SIL) simulation and Hardware-in-the-Loop (HIL) simulation. It is developed by George Zogopoulos-Papaliakos.
Gitter chatroom¶
A Gitter chatroom dedicated to last_letter can be found in this link. Omnipresence is not guaranteed.
Scientific background¶
Great effort has been exerted for the simulator to be as realistic as possible. To that goal, the project incorporates bibliography related to flight dynamics, physics modeling and sensor modeling. A congreggated document discussing the modeling of a fixed-wing UAV can be found in the Modeling a Fixed-Wing UAV (uav-modeling) Github project. It is a LaTeX project with a single .pdf output document. Although uav-modeling is independent of last_letter, it will often be referred to in the documentation.
License¶
The last_letter software project, which is a collection of ROS packages, uses the GPLv3 license.
Screenshots¶
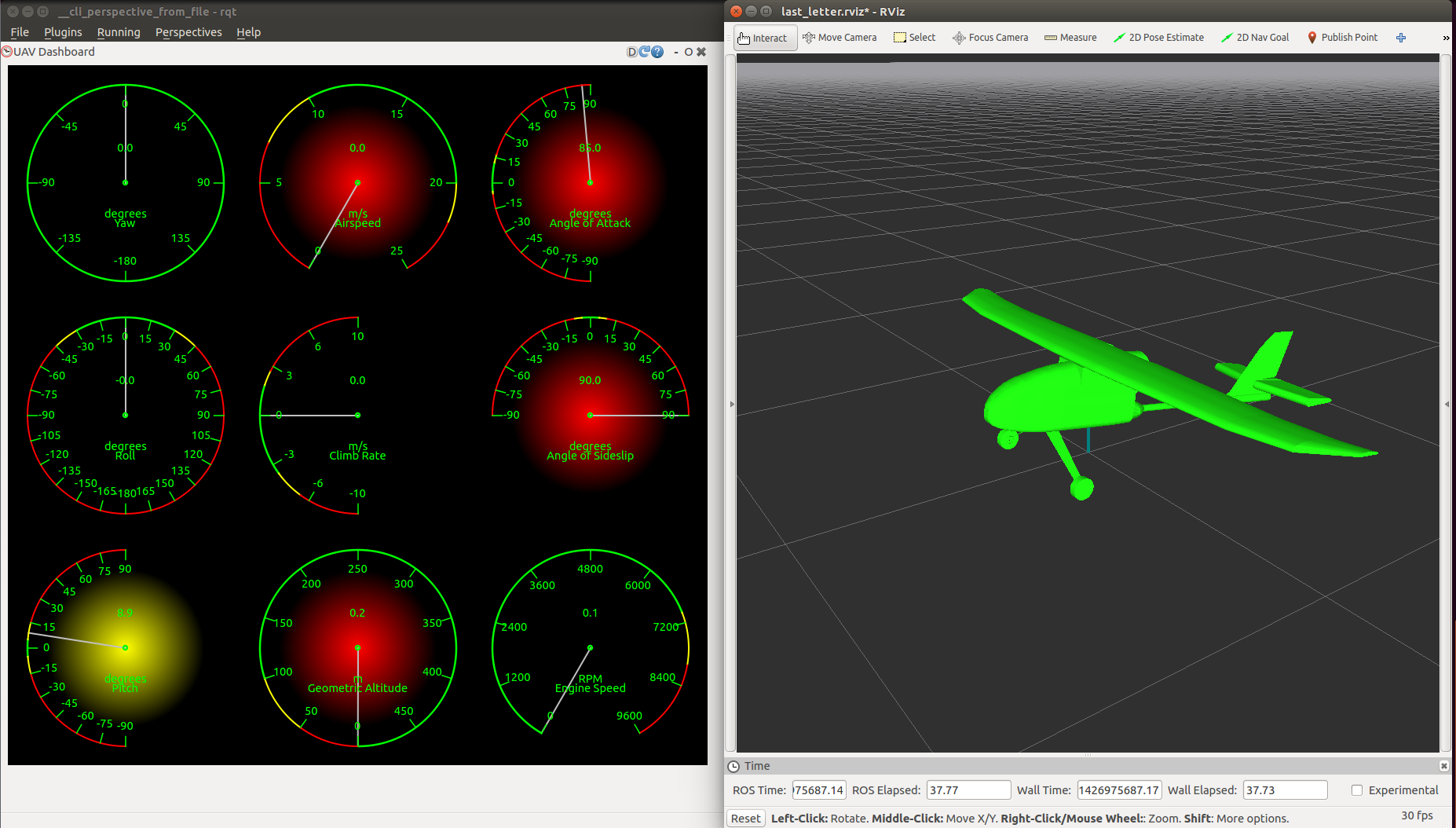
Avionics panel and visualization of an aircraft pre-flight
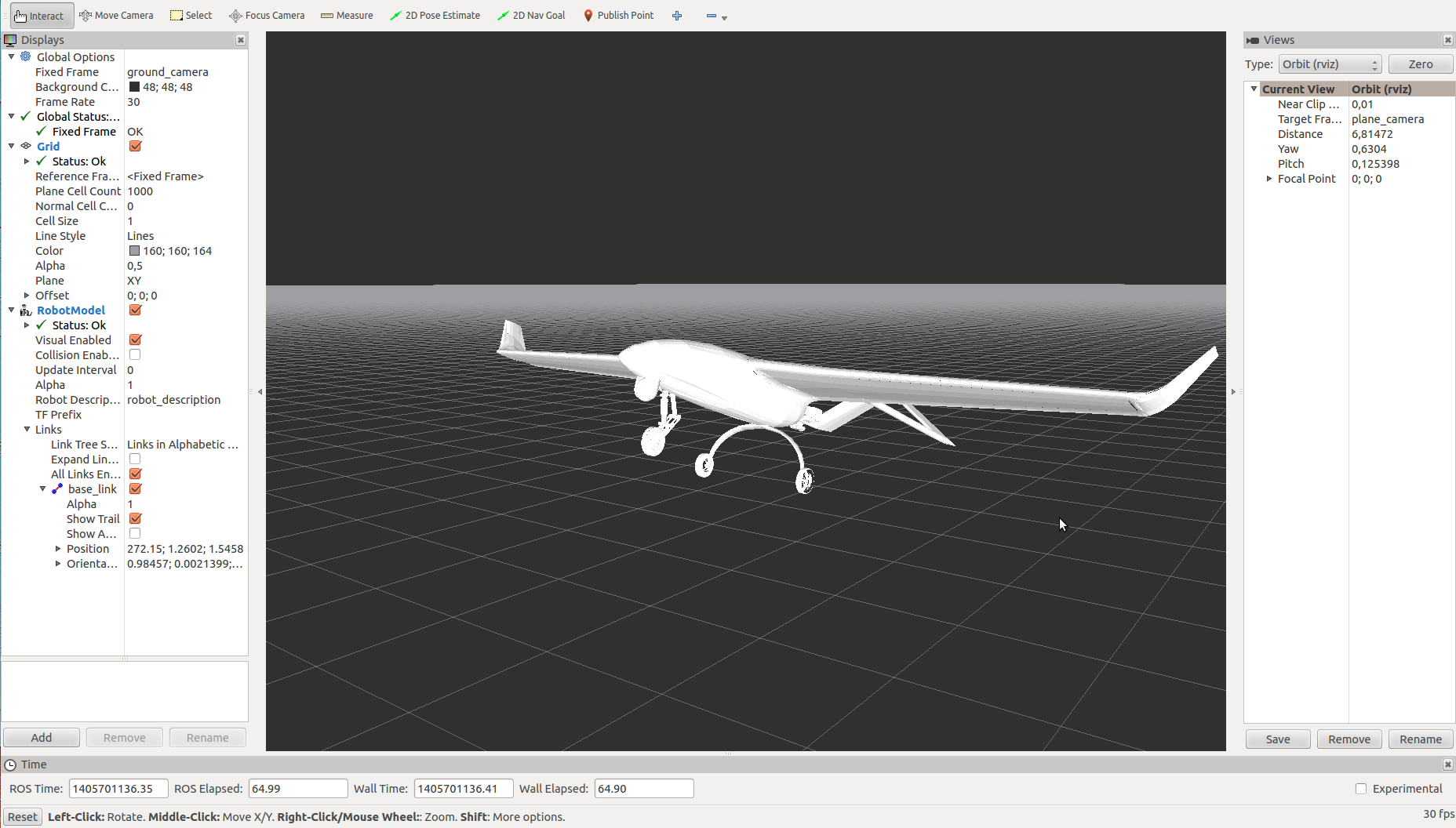
An aircraft 3D model during take-off
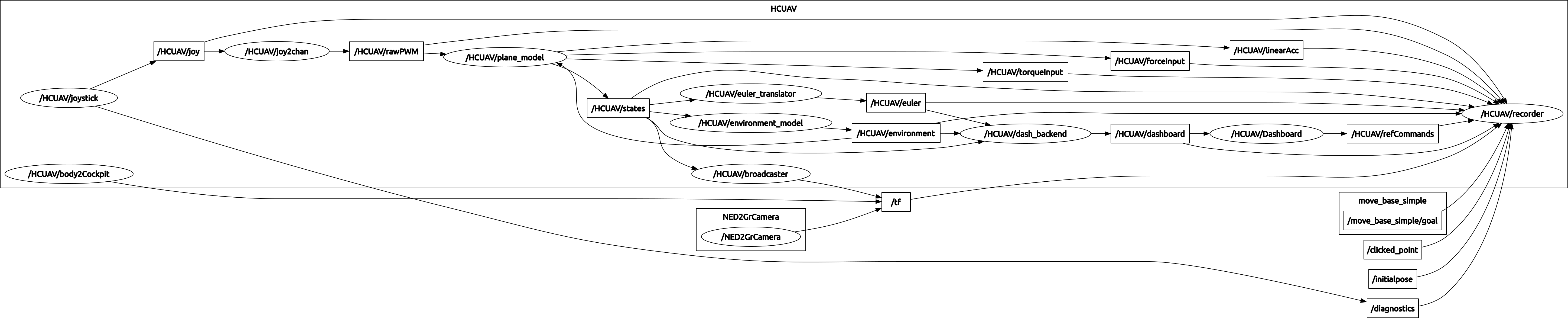
An indicative rqt_graph showing the node and topic layout of the simulator